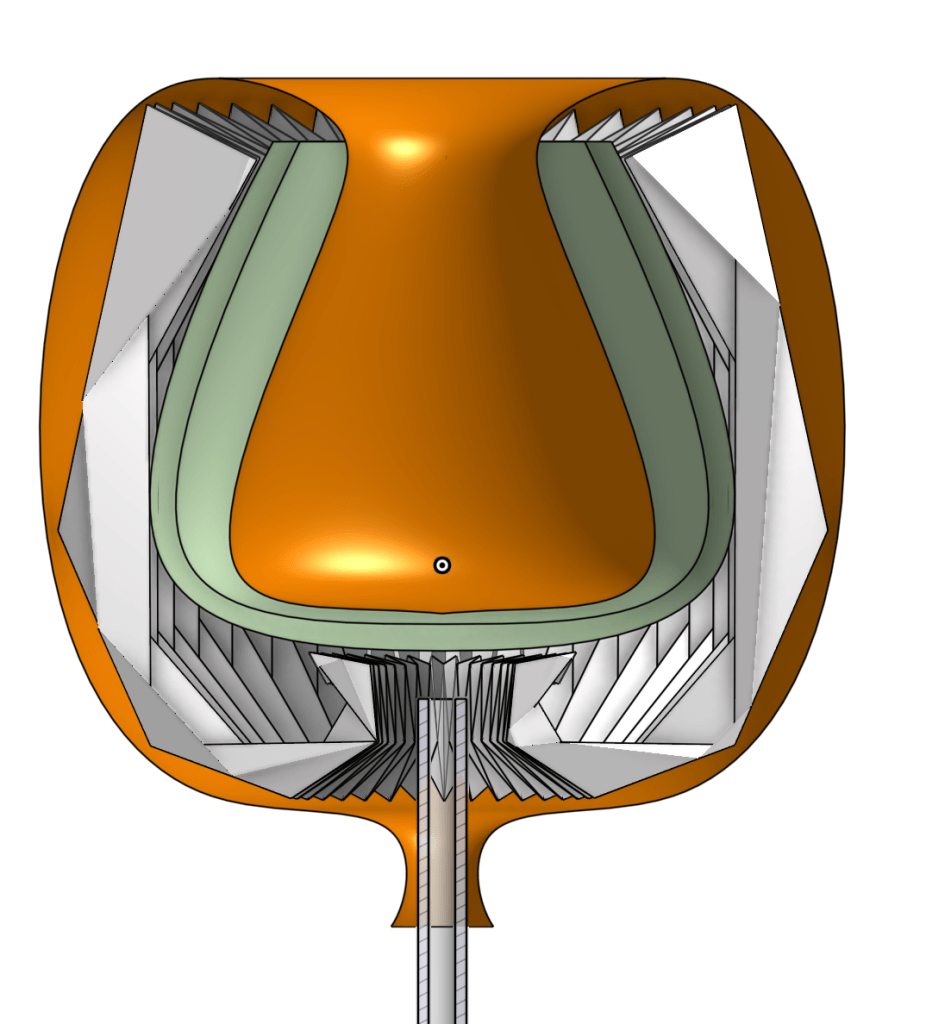
Origami-Inspired Pneumatically Actuated Soft Robotic Gripper
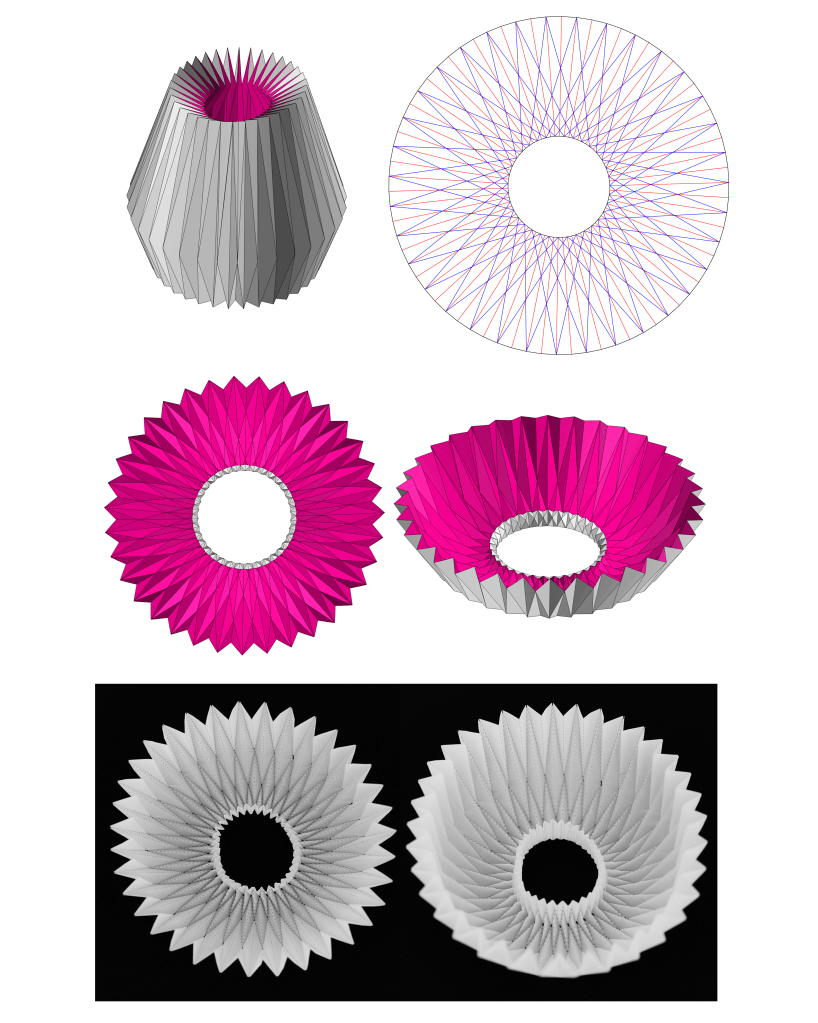
Designed and manufactured internal mechanism using computational origami design. Assessed the viability of various origami models for use in the gripper using stress analysis and origami modeling software. Developed laser cut manufacturing protocol for consistent results.
Conor Schott, Sam Villa, Dr. Alan Zhang